In Action
マシンビジョンで「見て判断する」イメージ
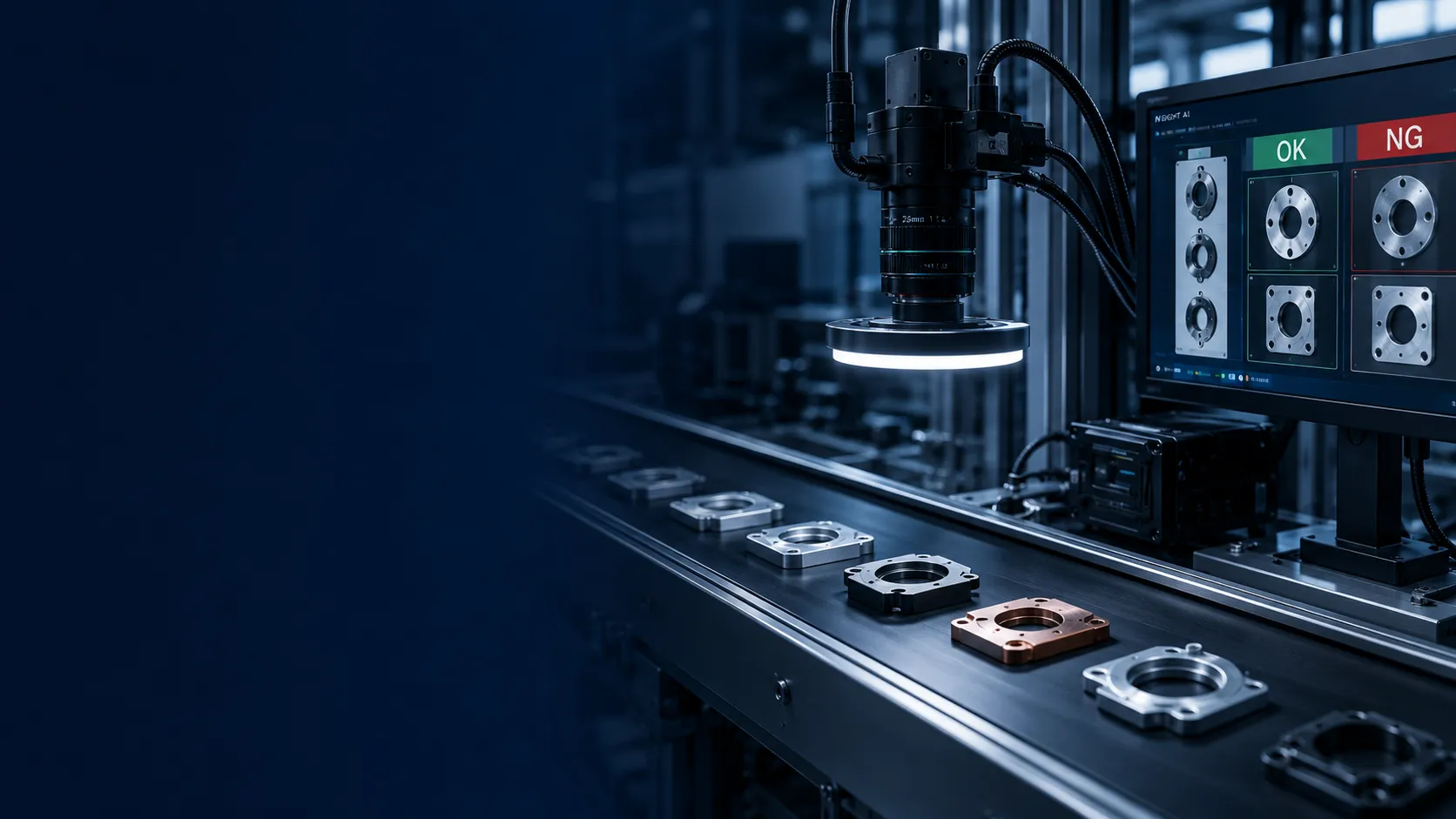
カメラ・照明で対象を撮影し、画像認識で良否や位置・姿勢を捉える産業用マシンビジョンの考え方が、ビジョンガイドの土台になります。
カメラ・3Dでロボットの位置決め・把持・検査をガイドするビジョンガイドロボット。マシンビジョンで認識した「何が、どこに、どんな姿勢であるか」を座標・動作指示に変換し、ロボットの動きへつなげます。Nsight EdgeとPhysical AI/Vision AIを土台に実装し、ロボット連携は構想段階・PoCからご相談いただける領域です。
対象物の位置や姿勢がばらつき、固定ティーチングだけでは対応しきれないロボット・FAの現場を想定しています。
固定ティーチングや専用治具は、条件が整った現場では有効ですが、位置や姿勢がばらつく現場には対応しきれない場面があります。
撮影からロボットへの動作指示までを一つの流れとして設計し、ビジョンガイドをNsight Edge上で実装します。
固定カメラや3Dセンサーで、対象のワーク・現場を撮影する。
Vision AIでワークの種類・位置・領域を画像・3Dで認識する。
把持位置・向き・姿勢を推定し、動作計画につなげる。
算出した座標・姿勢をロボットが扱える動作指示に変換する。
位置決め・把持・検査のロボット動作をガイドする。
カメラ・照明で対象を撮影し、画像認識で良否や位置・姿勢を捉える産業用マシンビジョンの考え方が、ビジョンガイドの土台になります。
現場でAIを動かす産業向けエッジAIプロダクト。撮影から認識、位置・姿勢算出、ロボットへの動作指示までを現場のエッジ端末で処理します。
Nsight Edgeを見る →認識結果をロボット・FA設備の動作へつなげる拡張領域。把持位置推定・姿勢推定から動作指示までを担います。ロボット連携は構想段階・PoCから相談可能です。
Physical AIを見る →ワークの種類・位置・領域を画像・3Dで認識するビジョンエンジン。ロボットの目となる認識を担います。
Vision AIを見る →ビジョンガイドロボットは、単独のツールではなく、Nsightの中核プロダクト「Nsight Edge」と、その上で動作するPhysical AI/Vision AIを土台に、現場ごとに実装します。AIモデルだけでなく、カメラ・照明・3Dセンサー・撮影条件・ロボット/PLC連携まで含めて設計することで、現場で使えるビジョンガイドになります。ロボット連携は実績を積み上げている途上の領域のため、構想段階・PoCから一緒に進め方を考えます。
現場の動画・対象物・既存ロボットの情報をお送りいただければ、Nsight EdgeとPhysical AIを土台にした認識から動作までの進め方をご提案します。構想段階・PoCから伴走します。